写真のようにMicroBitをmicroUSBを使ってPC(windows7)に接続してPCからPythonプログラムを転送しそれをMicroBitで実行するという手順である。PC側ではMuと呼ばれるエディター(むしろ統合環境)を使った。Muという統合環境ではPythonプログラムの編集、シンタックスチェック、プログラムのMicroBitへの転送ができる。
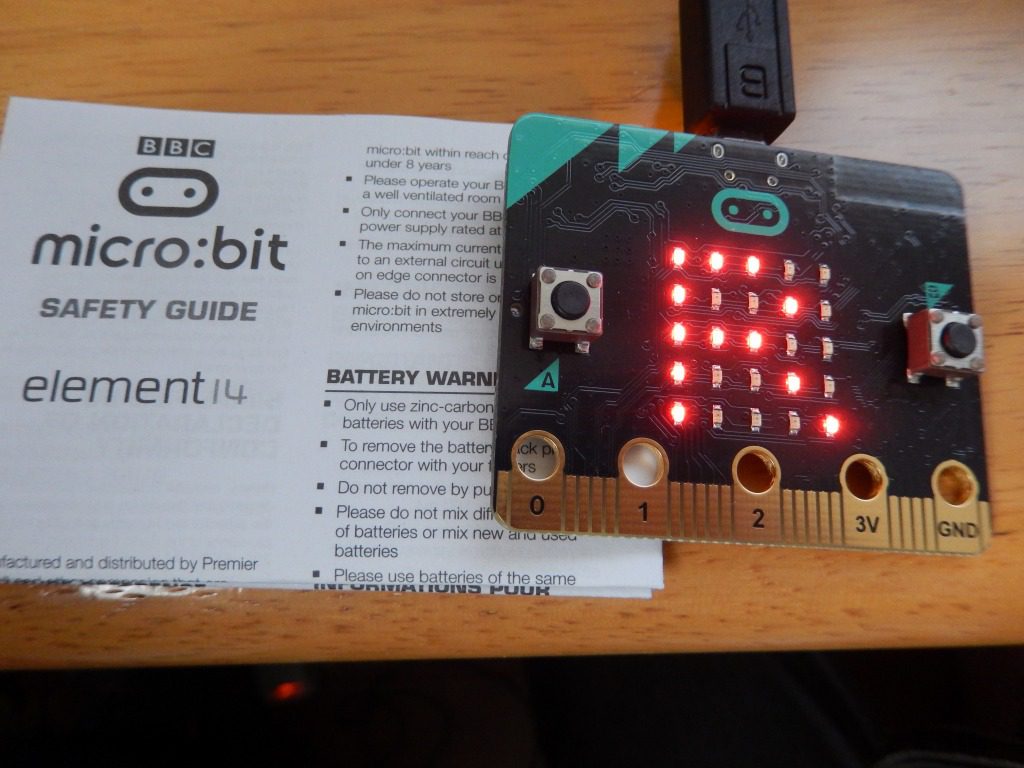
さらにインタープリタモードでPythonのコマンドを実行することもできる。このモード(REPLと名前がついている)に入ると転送したプログラムは一時停止した状態になる。このモード画面をprint文の出力画面にも利用できる。そのばあいにはMicroBitの裏面にあるリセットボタンを押し、一時停止していたプログラムを実行させる(リセットの操作が面倒)。
例として使ったプログラム:
from microbit import *
while True:
reading = accelerometer.get_x()
sleep(20)
print((reading,))
if reading > 120:
display.show("R")
elif reading < -120:
display.show("L")
else:
display.show("-")
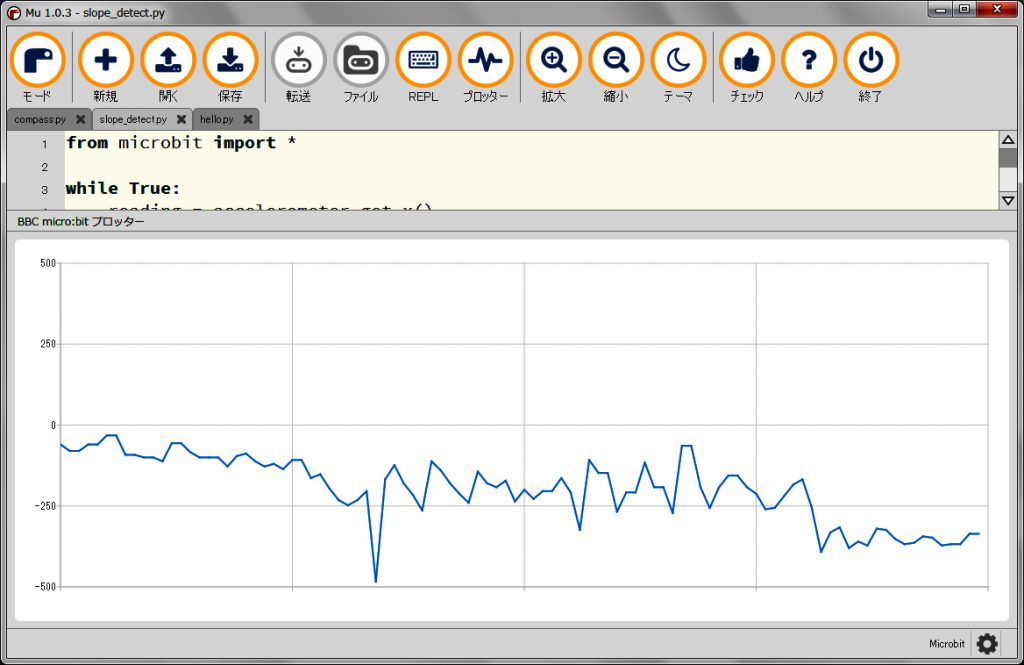
加速度センサーでボードの傾きを検出し、左右(”L”、”R”)を表示する簡単なプログラムである。プログラム中のプリント文print((reading,))はインタープリタモード画面やMuが持つプロッタ機能のためである。プロッタ機能は繰り返しの出力(出力形式はタプルである。一つのみの値をタプルにするには(x,)とすればよい)をグラフ化する。このプロッタ機能は便利である。
実行中の画面